Vertebral compressive fracture due to Osteoporosis is a significant health issue in our aging society. The reduced cancellous bone density and subsequent weakening of the vertebral column is one of the main causes of vertebral compressive fracture. The recently developed Percutaneous Vertebroplasty (PV) has been proven to be a quick and effective treatment technique for such condition in both biomechanical testing and clinical trials. Nevertheless, the utilization of PV is still commonly associated with cement leakage and fracture of adjacent vertebrae, both with devastating consequences. Our research therefore attempts to investigate and elucidate possible mechanisms associated with post-PV complications utilizing continuous fatigue loading testing and three-axial strain gage analysis. It is hoped that the findings of our research will lead to the development of a clinical guideline for clinicians on how to best perform the PV technique in order to minimize the rate of complication as well as a more suited protocol for post-operative rehabilitation program.
Dynamic performance of intervertebral disc (IVD) is indicative of the shock absorbing capacity of the IVD. It is therefore essential to gain a sound understanding of the dynamic performance of IVD in any disc disease research. Our research focus on the use of One-Dimensional free-vibration system to model dynamic performance of IVD in order to determine the spring constant and damping coefficients of IVD and such data can then be used for comparative analysis after fatigue loading testing or specific treatments of biochemical agents.
One-Dimensional free-vibration system is,
![]()
This system consisted of three components, mass, spring, and damper.(M)is the total mass of vertebral body and the fixture. Spring constant(K, N/mm), damping coefficient(C, Ns/mm), and damping ratio(ζ) of vertebrae motor unit are calculated based on the displacement caused by the provided force. The specimen withstanding the force led to the production of the first crest where the second and third crests are produced by the reaction force (see figure below). Spring constant, damping coefficient, and damping ratio (ζ) of vertebrae motor unit can be determined by displacements (x1 and x2) and the period between the second and third crest. The following equipment are utilized:
![]()
Note that the damping ratio (ζ) is the function of mass, spring constant, and damping ratio. The figure below is the displacement versus time curve with the subject undergoing a specific loading:
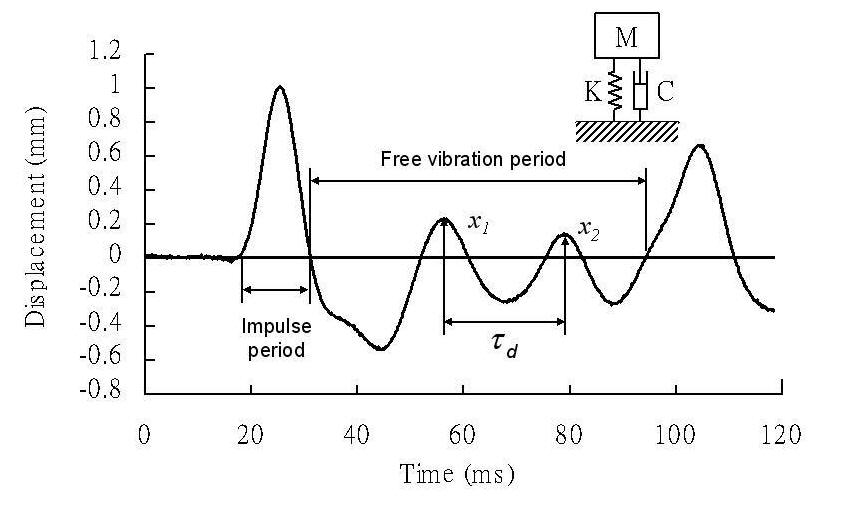
Impulse leads to the first crest. After the specimen withstood the impulse, there will be a free-vibration phase and second, third crests.
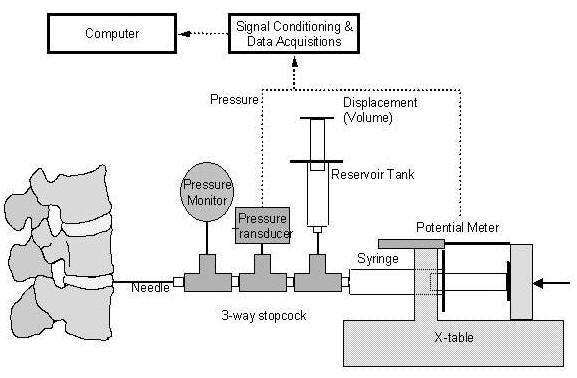
A damaged Anulus Fibrosus (AF) structure combined with compressive forces on the Nucleus Pulposus (NP) can often result in protrusion of the Intervertebral Disc (IVD) leading to symptomatic Radiculopathy and Neuropathy. It has been shown that despite the initial success of surgical interventions, the reoccurrence rate of protrusion remains high due to the loss of integrity of the AF and the subsequent inability to withstand the compressive forces. Much of the studies to date have assessed the applicability of biomaterials such as Platinum fiber coil, NBCA glue, Bone cement and Gelfoam in strengthening and/or regeneration of the IVD capacity against external forces. In order to provide quantitative measure of the ability of the different mediums in achieving the desired outcome, our laboratory developed a novel Quantitative Discomanometry (QD) apparatus. The QD consisted of a needle syringe injector which allows delivery of saline at a constant rate into the disc of interest. Based on the amount of saline delivery and the return feedback of pressure, the apparatus will be able to provide important such as the Pressure-Volume regression curve, Leakage pressure, Leakage volume and Saturate pressure and volume. The combination of these parameters will allow a quantitative gauge of the integrity of the IVD, particularly the Saturate pressure which can be considered to be the maximum pressure that the IVD is able to withstand before rupture.

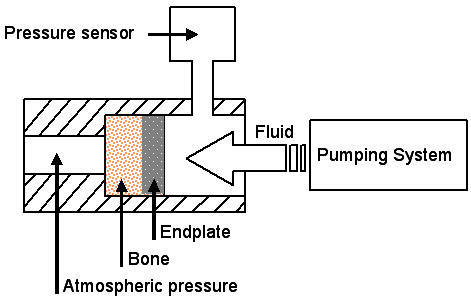
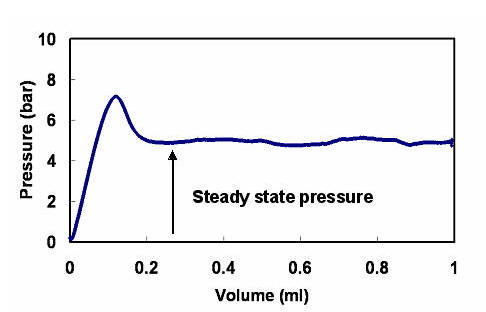
The endplate has an important role in the transfer and exchange of nutrients and metabolic wastes in the Intervertebral Disc (IVD). It is therefore often considered to be an important interface for IVD cell therapy and an in-depth understanding of the Endplate is essential for the advancement of IVD tissue engineering. With the combined use of Computed Tomography and the “Disc Volume-Pressure relationship analysis system”, our laboratory is able to analysis and determines the integrity, ultimate strength and failure mode of the individual vertebral endplate. Concurrently, the laboratory designed pumping system is able to deliver 1ml of Saline at a constant speed of 0.0075 ml/s through a needle syringe. Throughout the delivery of the saline, the incorporated pressure sensor constantly monitors the change of pressure against the injected volume. The parameters of interest include the Steady state pressure, Resistance to Outflow Pressure (ROP) and Resistance to Inflow Pressure (RIP). Steady state pressure refers to the constant pressure obtained at the first point of constant fluid flow, ROP is the pressure against the flow of saline through the endplate into the vertebral body where the RIP is the pressure required against the flow from the vertebral body through the endplate and into the IVD.
Computed Tomography (CT)-guided surgical interventions can dramatically improve the success rate of highly technical and high-risk surgeries. Despite the apparent clinical benefits of the CT-guided navigation systems, due to the enormous cost and added operational complexity, many clinicians are reluctant for its implementation and the lack of its wider acceptance clinically.
Given the higher operative rate of spinal disease, our laboratory developed a custom “Computer Guided Spinal Surgical Navigation System” which consisted of a Miniature-tracking unit, a Reference frame unit and a three-dimensional image-processing unit. The miniature-tracking device consisted of a robotic arm with four degrees of freedom to allow better and more accurate positioning when performing the surgery. The joint of the robotic arm has an image sensor built in to allow real time location feedback. 3D imaging navigation system can rapidly establish the transformation matrix between surgical instruments and medical imaging, and provide accurate positional feedback to the operating surgeon.